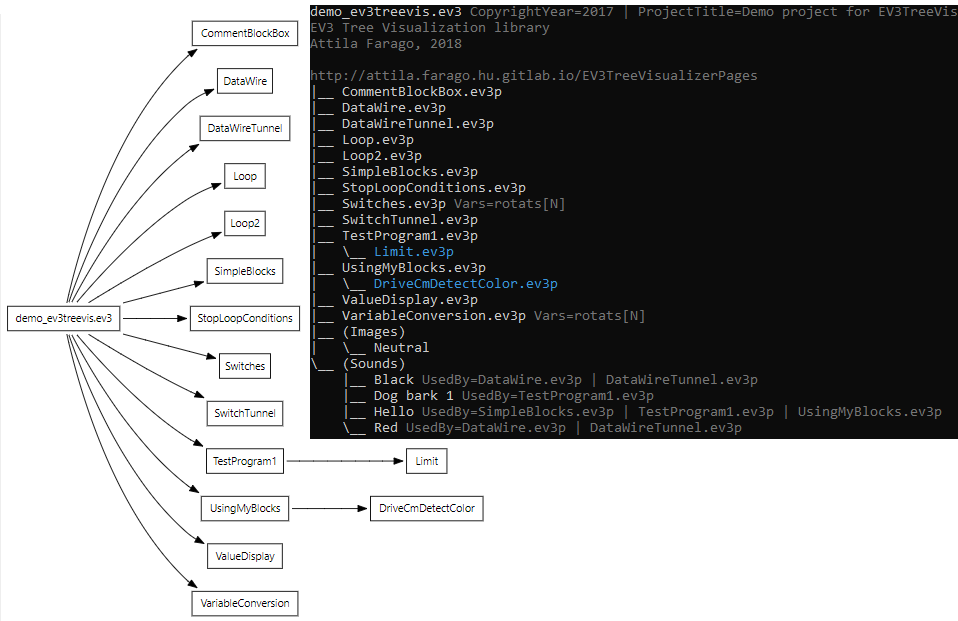
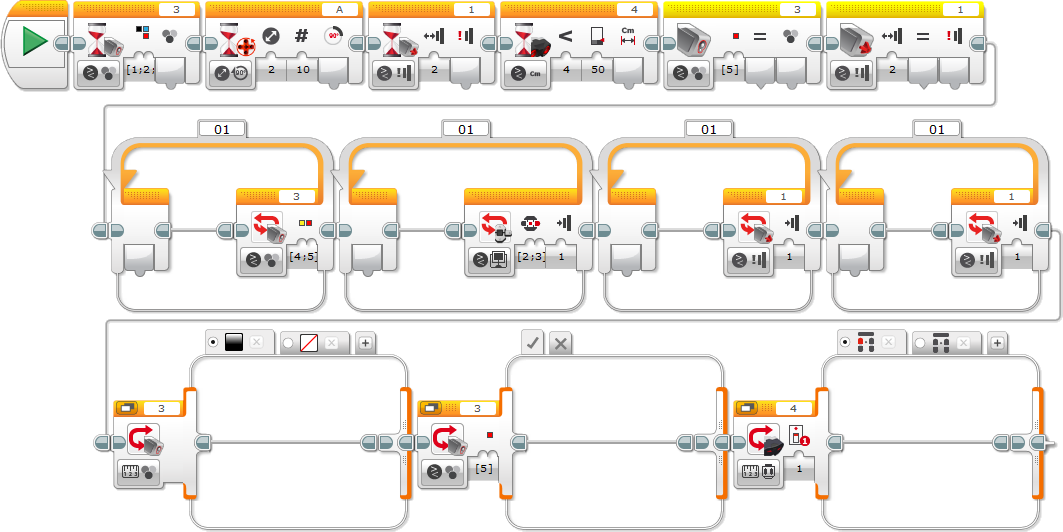
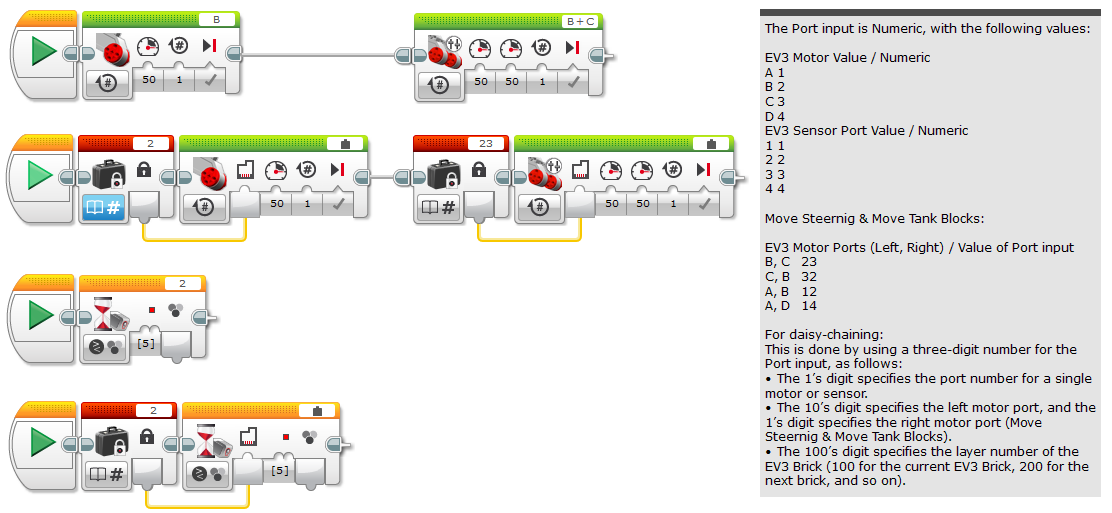
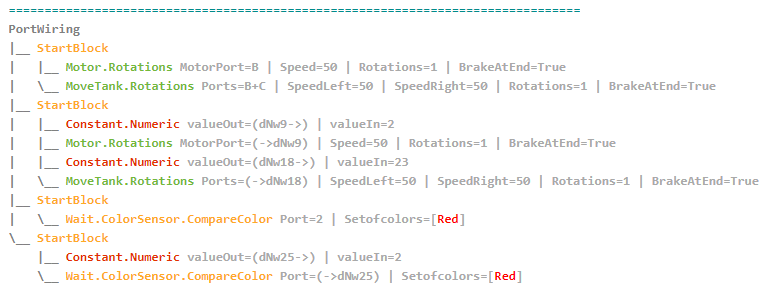
Block visualization
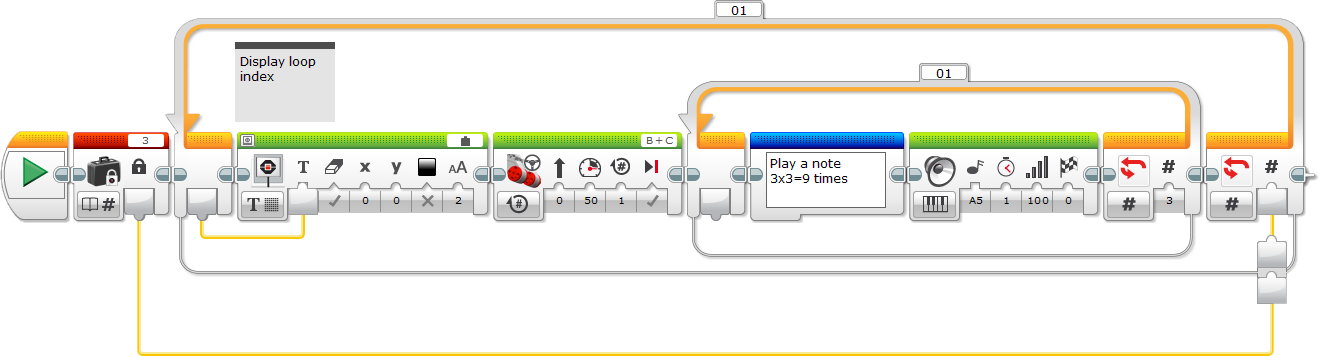
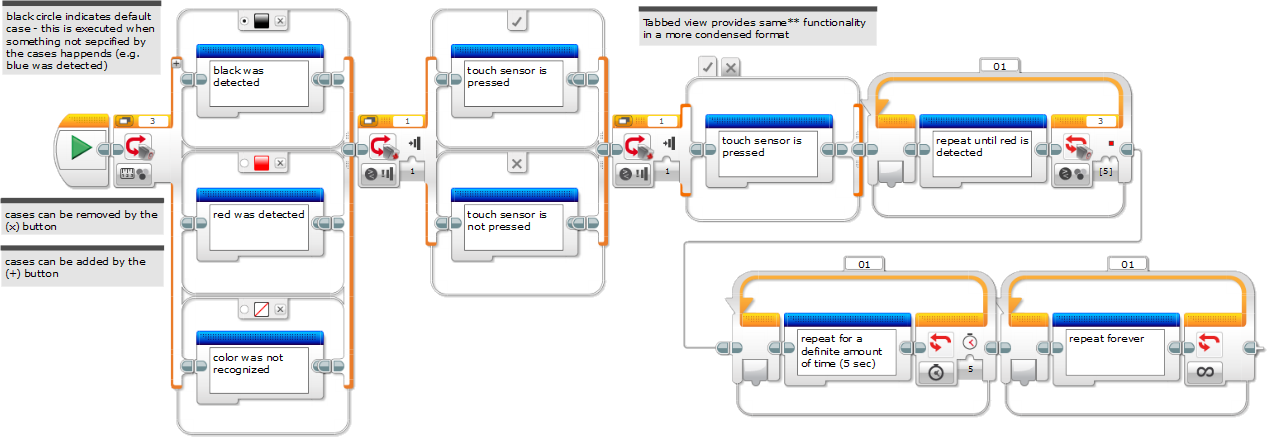
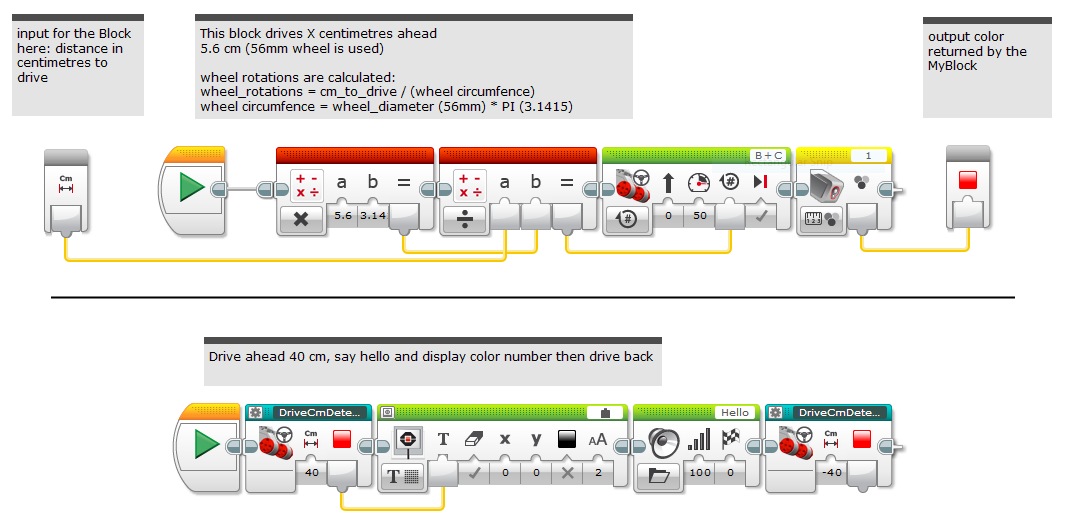
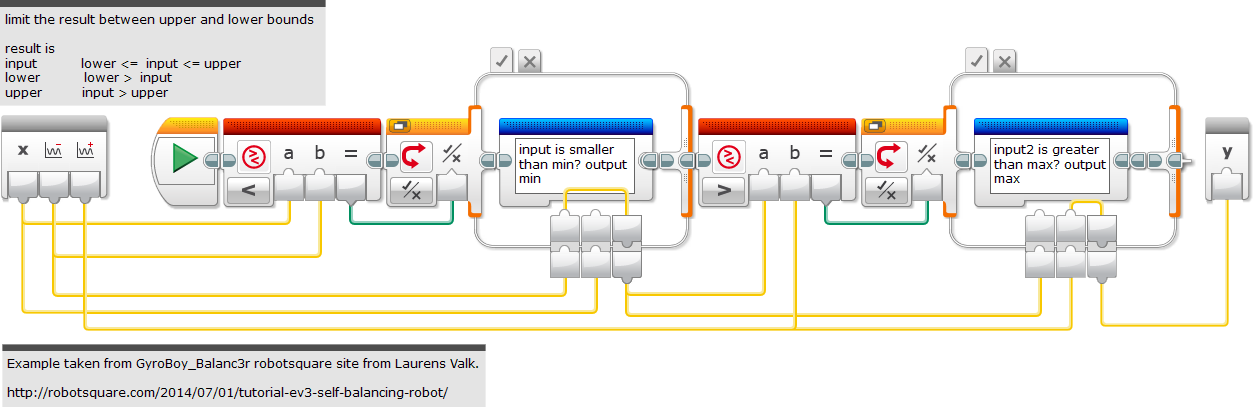
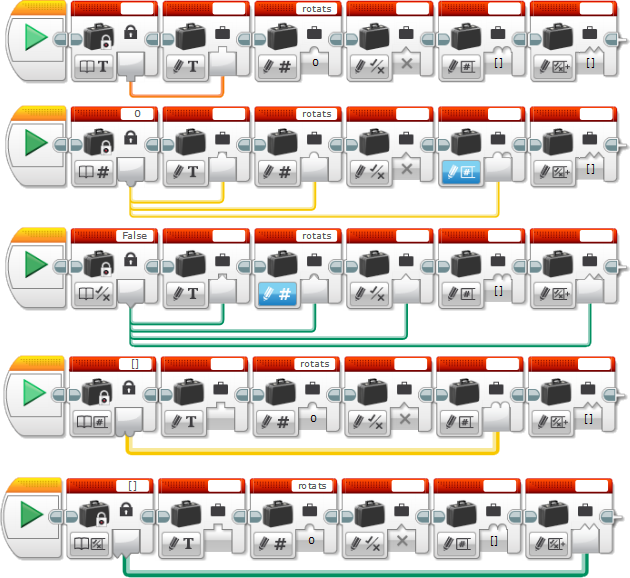
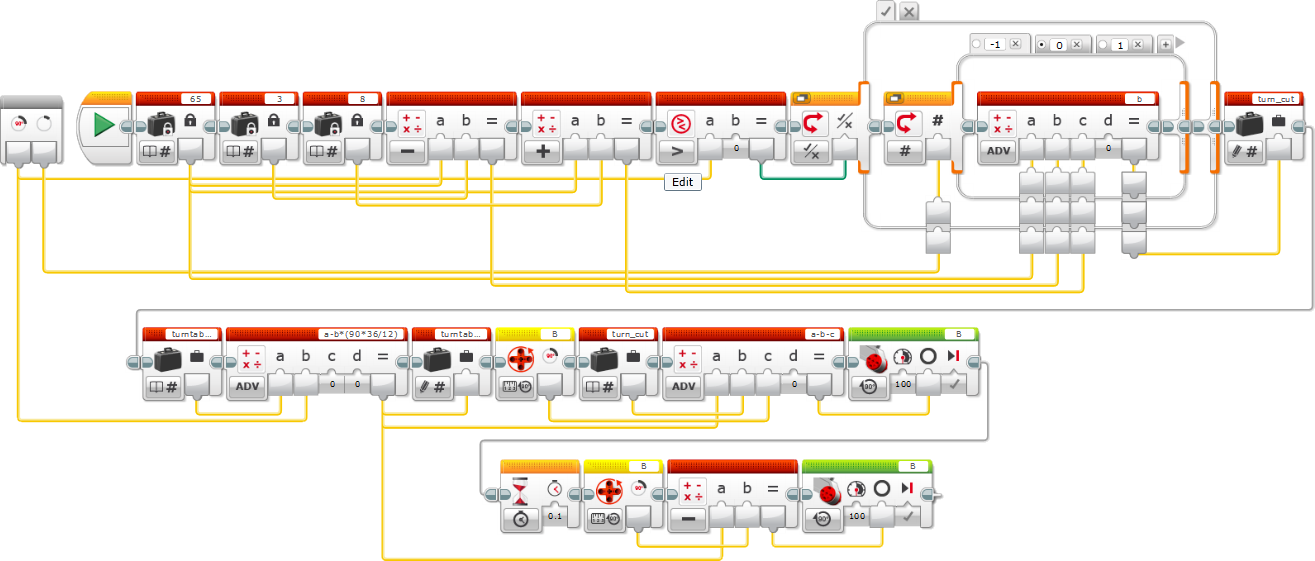
The official Mindstorms program offers a graphical language for creating stunning programs. In the EV3G language it is easy to drag new blocks and connect the pieces like a puzzle.
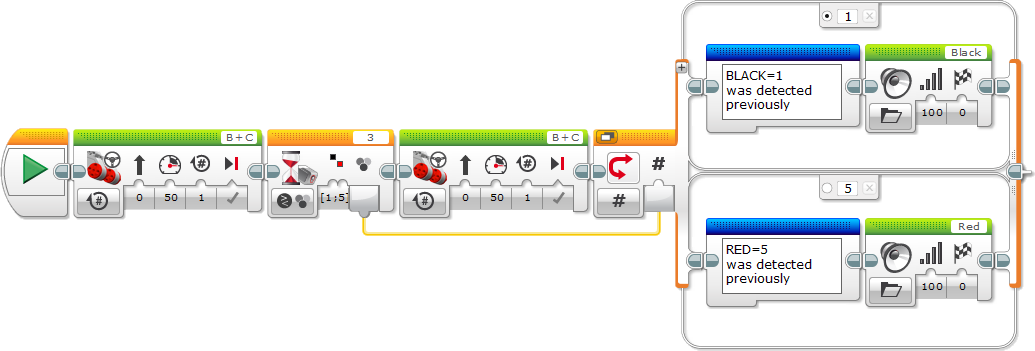
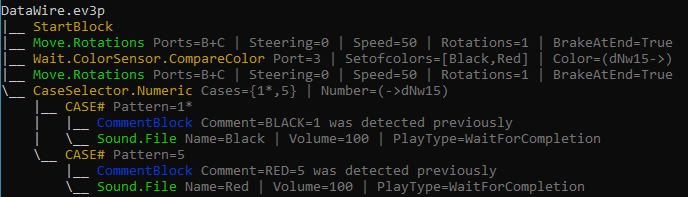
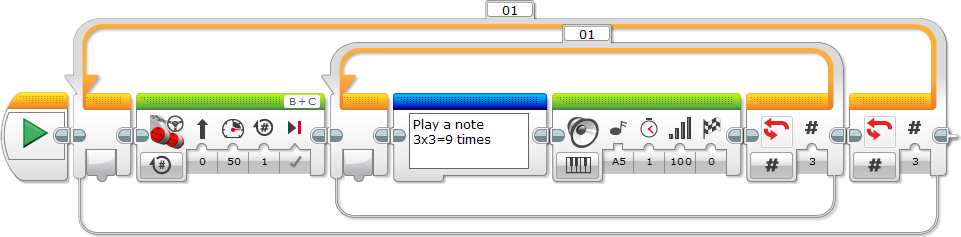
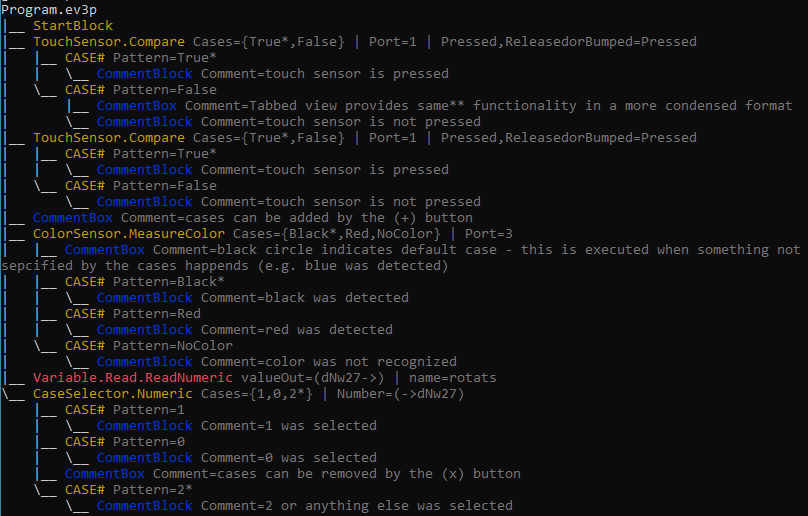
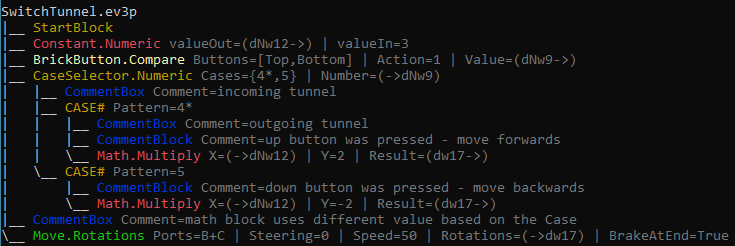
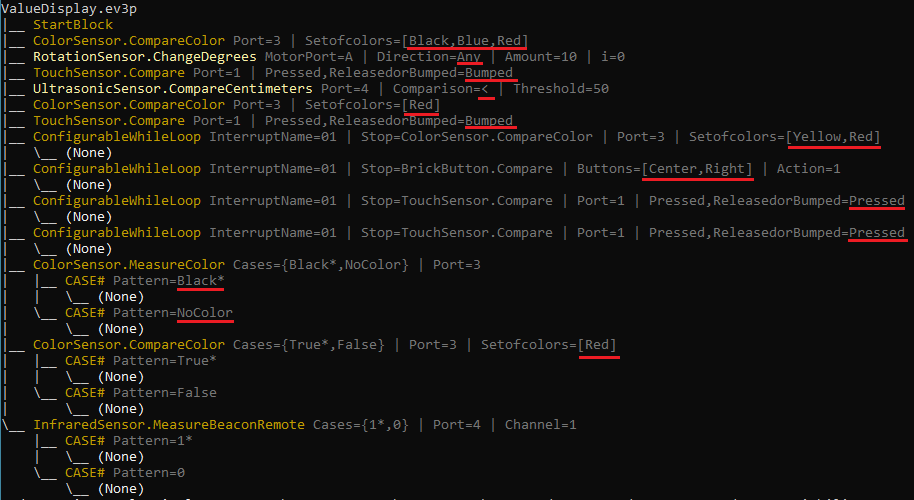
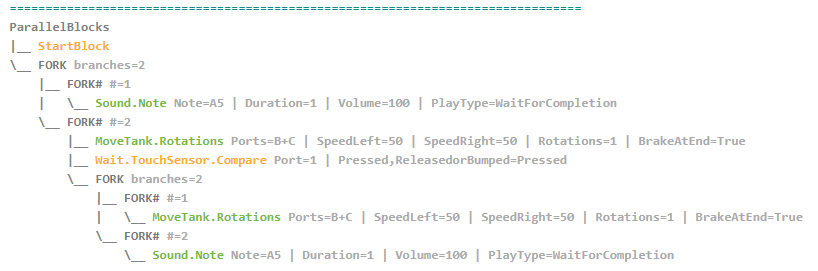
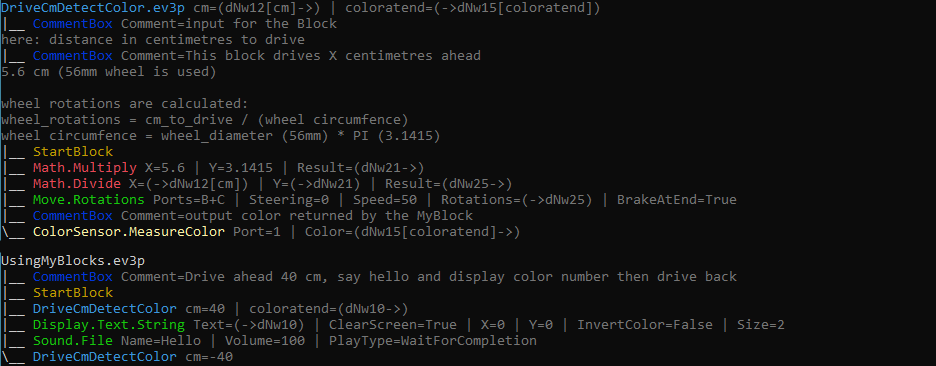
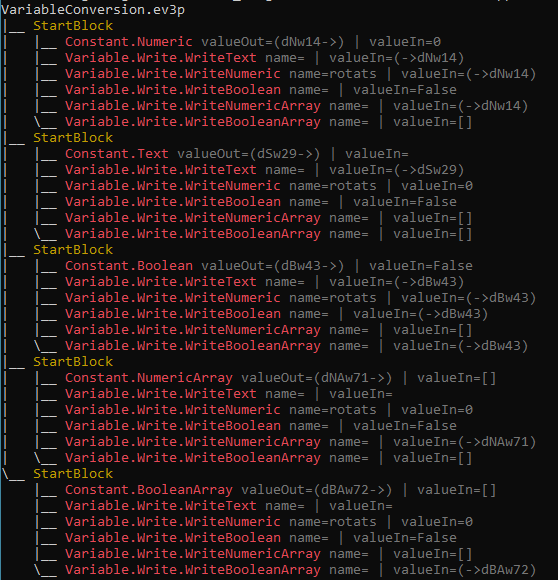
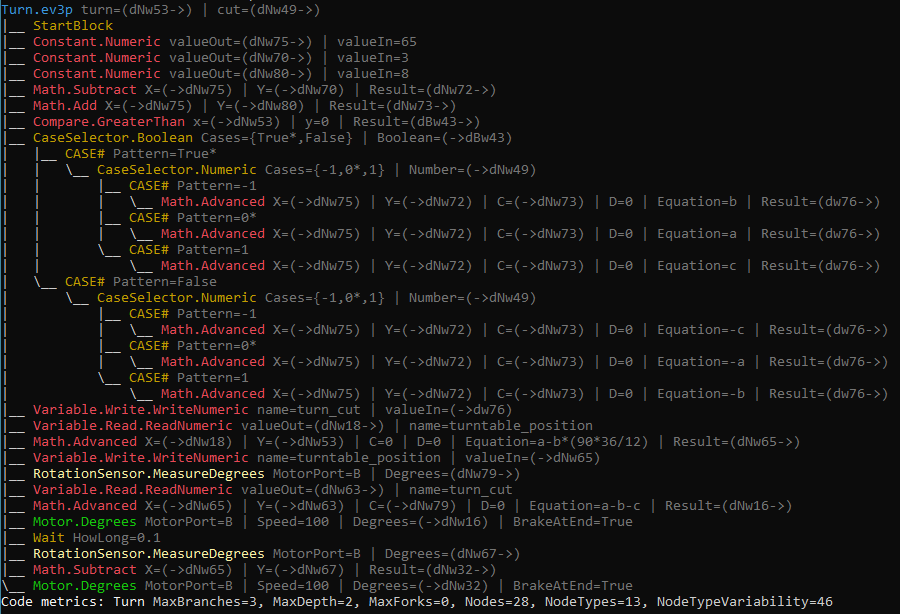
In EV3TreeVis each Mindstorms block is visualized as an individual block with all its input and output attributes. Blocks follow one another based on the execution sequence.
Block colors and icons properties follow the properties displayed within the EV3 Mindstorms editor.





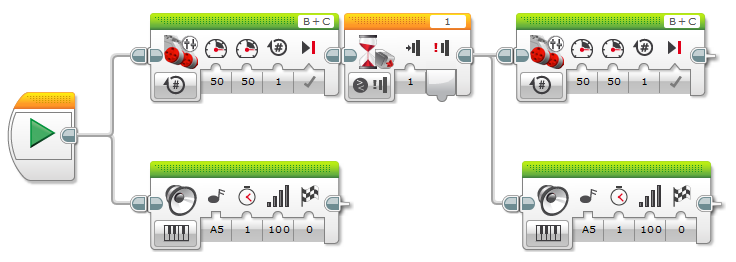
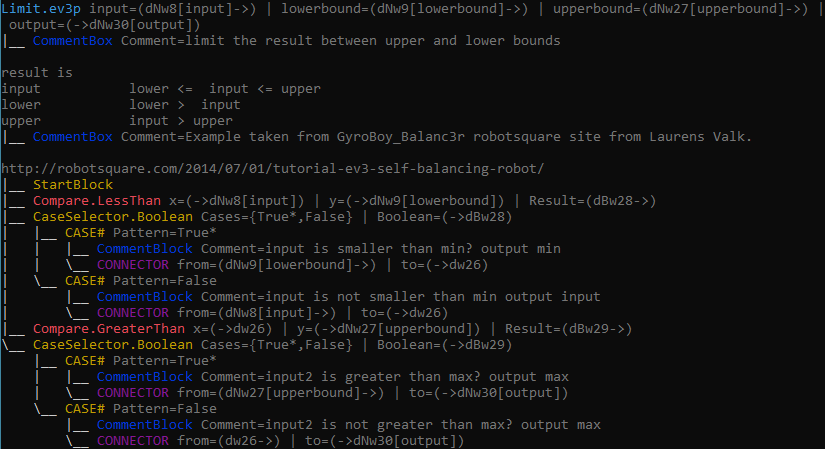
Comment blocks and boxes
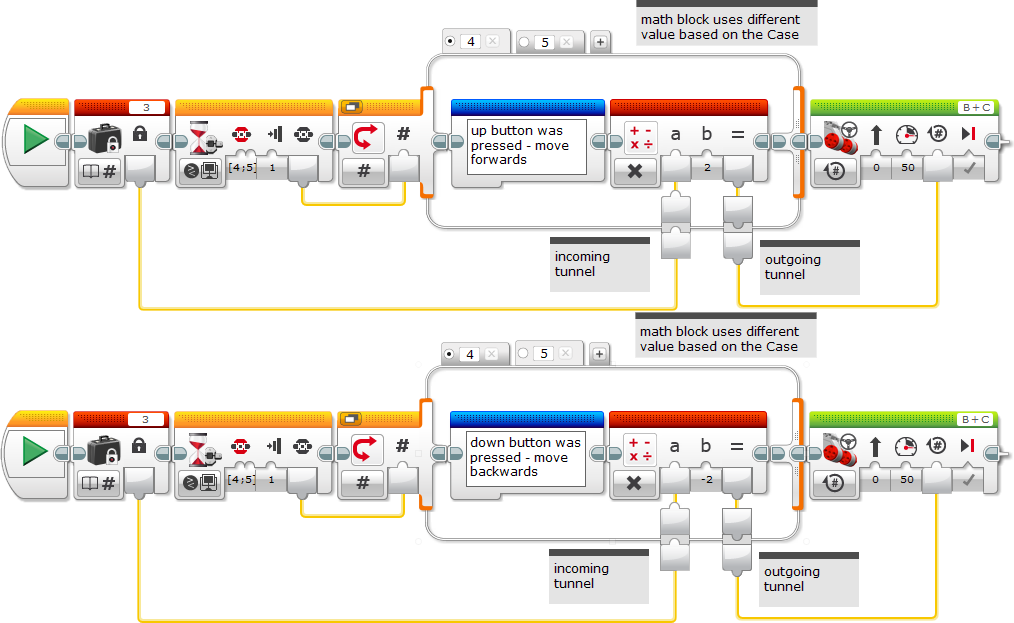
Your code is often self explanatory and obvious. Sometimes things get more complex and hard to remember.
Actually things are always hard to remember. A good technique is to write the most important information to remember nearby to the code.
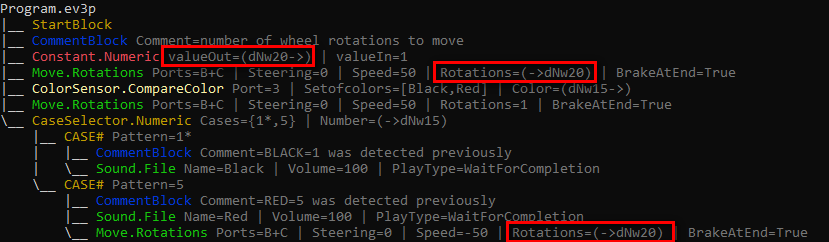
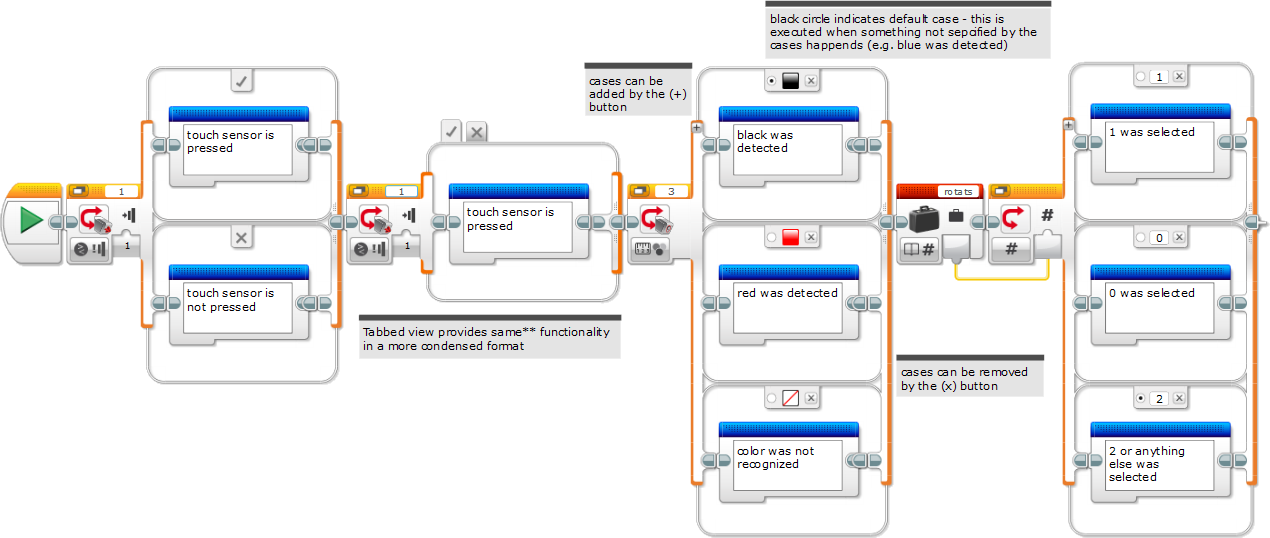
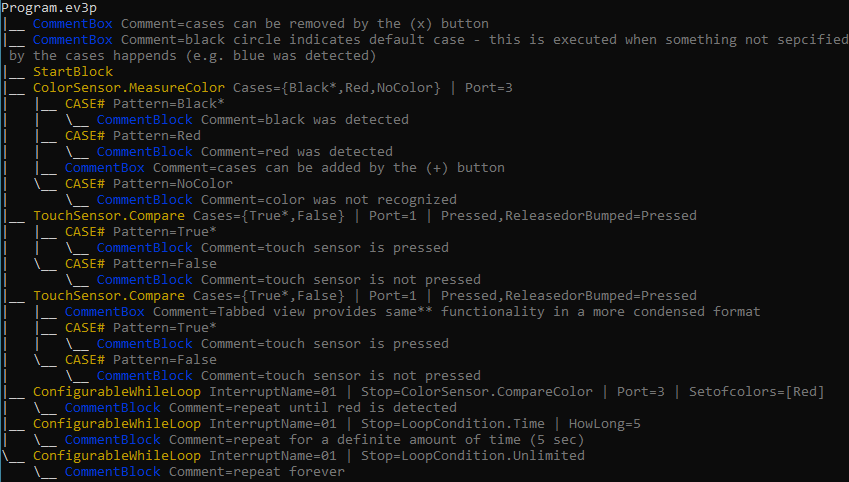
EV3 offers blue comment blocks that can be placed inside your code or comment boxes that are free to move.
Little amounts of available space for text
Both CommentBlocks and CommentBoxes are handled in the program. Comment boxes are added before to the nearest valid* block considering loop and switch internal structures.
* Inactive blocks are ignored.